
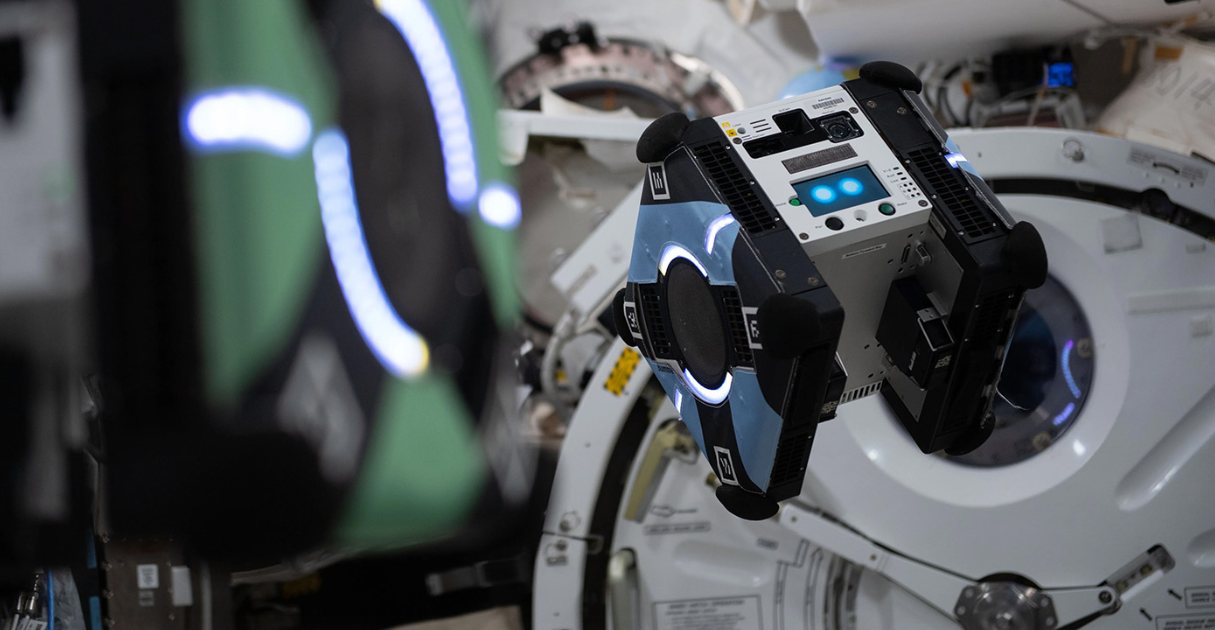
Para peneliti di Stanford University berhasil mengembangkan teknologi kecerdasan buatan (AI) yang mampu mempercepat navigasi robot di dalam Stasiun Luar Angkasa Internasional (ISS). Robot bernama Astrobee kini dapat bergerak 50–60% lebih cepat menggunakan kontrol gerak berbasis pembelajaran mesin, menandai demonstrasi pertama di orbit yang menggabungkan AI dalam navigasi robotik.
Navigasi di ISS sangat menantang karena interior stasiun yang sempit dan penuh dengan berbagai peralatan seperti rak eksperimen, kabel, dan kamera. Lingkungan mikrogravitasi dan gangguan seperti aliran udara dari ventilasi menambah kompleksitas kontrol robot, yang sulit diatasi oleh algoritma tradisional dengan kemampuan komputasi terbatas dari perangkat onboard.
Tantangan Navigasi di ISS


Interior ISS dipenuhi oleh perangkat berukuran besar dan banyak kabel yang menghambat pergerakan bebas robot. Berbeda dengan kondisi di Bumi, komputer penerbangan yang ada di ISS tidak cukup kuat untuk melakukan perhitungan jalur secara intensif dan cepat. Oleh karena itu, diperlukan metode baru agar robot dapat melewati area yang sempit tanpa risiko bertabrakan atau gagal.
Cara AI Meningkatkan Kecepatan Navigasi
Tim peneliti menggunakan ribuan data lintasan navigasi sebelumnya untuk melatih model pembelajaran mesin. Model ini menghasilkan prediksi awal yang akurat (warm start) sebelum algoritma optimisasi dijalankan secara penuh. Pendekatan hibrida ini tetap mematuhi semua batasan keselamatan NASA dan mempercepat proses perencanaan lintasan secara signifikan.
Dalam beberapa situasi sulit seperti melewati modul dengan konfigurasi rak dan peralatan berlawanan, AI memungkinkan Astrobee menyelesaikan perhitungan jalur hampir dua kali lebih cepat daripada metode tradisional.
Uji Coba di Bumi dan Stasiun Luar Angkasa
Sebelum penerapan di ISS, sistem AI ini diuji menggunakan meja udara simulasi mikrogravitasi di NASA Ames. Pada uji di luar angkasa, astronaut seperti Sunita Williams hanya mengatur perangkat awal, sedangkan operasi dikendalikan dari jauh oleh tim Stanford lewat NASA Johnson Space Center. Tes dilakukan dengan membandingkan jalur yang direncanakan secara konvensional dan jalur yang diprediksi AI di 18 rute berbeda, dengan hasil konsisten mempercepat navigasi, terutama pada area padat peralatan.
Validasi dan Manfaat untuk Misi Masa Depan
NASA telah mengesahkan teknologi ini pada tingkat kesiapan teknologi level 5 (TRL-5), mengindikasikan sistem sudah diuji dan bekerja di lingkungan operasional sebenarnya. Ini menurunkan risiko penggunaan robot otonom dalam misi eksplorasi bulan dan Mars mendatang.
Ke depan, rencana pengembangan melibatkan integrasi model AI yang lebih maju seperti yang digunakan pada kendaraan swakemudi dan pemrosesan bahasa alami. Robot otonom di masa depan diharapkan bisa melakukan perencanaan kompleks, penjelajahan mandiri, serta bantuan bagi astronot di lingkungan yang komunikasi radio tertunda atau sulit.
Teknologi ini membuka peluang baru bagi robot luar angkasa untuk melakukan tugas berat dan berbahaya, mulai dari pemetaan gua di bulan hingga pendampingan habitat astronot di planet jauh, menggunakan teknologi AI yang telah terbukti efektif di ISS.



