

Sensor ultrasonic menjadi salah satu komponen penting dalam robot modern karena mampu membantu mesin mendeteksi jarak dan membaca rintangan di sekelilingnya. Teknologi kecil ini bekerja cepat, hemat biaya, dan cukup andal untuk berbagai kebutuhan navigasi otomatis.
Dalam praktiknya, sensor ultrasonic banyak dipakai pada robot pembersih, robot industri, kendaraan tanpa pengemudi, hingga sistem bantuan parkir pada mobil modern. Fungsinya sederhana, tetapi dampaknya besar karena robot bisa bergerak lebih aman tanpa harus terus bergantung pada pengawasan manusia.
Cara kerja sensor ultrasonic
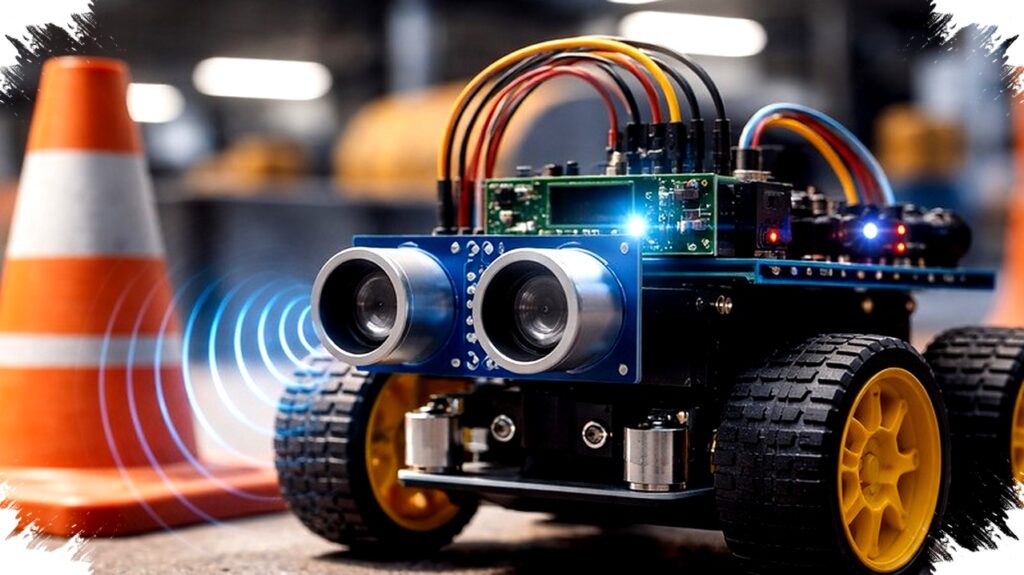
Sensor ultrasonic memakai gelombang suara berfrekuensi tinggi yang tidak terdengar oleh manusia. Perangkat ini memancarkan gelombang ke arah depan, lalu menangkap pantulannya saat mengenai objek di sekitar robot.
Dari waktu tempuh pantulan itu, sistem menghitung jarak objek menggunakan rumus jarak = waktu tempuh gelombang × kecepatan suara dibagi dua. Kecepatan suara di udara pada suhu ruangan berada di kisaran 343 meter per detik, sehingga perhitungan jarak bisa dilakukan dengan cepat dan cukup akurat.
Mengapa robot membutuhkan sensor ini
Robot yang bergerak mandiri harus bisa mengenali ruang di depannya. Sensor ultrasonic membantu robot memutuskan kapan harus berhenti, berbelok, atau mencari jalur lain saat ada benda di depan lintasan.
Sensor ini sering dipasang di bagian depan robot sebagai pendeteksi utama. Saat objek terdeteksi dalam jarak tertentu, sistem kontrol langsung memberi instruksi agar robot menghindar sebelum terjadi tabrakan.
Keunggulan yang membuatnya populer
Sensor ultrasonic banyak dipilih karena tidak membutuhkan kontak langsung dengan objek. Selain itu, biayanya relatif rendah, pemasangannya mudah, dan hasil pengukuran jaraknya cukup baik untuk kebutuhan dasar hingga menengah.
Keunggulan lain ada pada kemampuannya bekerja tanpa terlalu dipengaruhi cahaya. Berbeda dengan sensor berbasis kamera atau optik, sensor ultrasonic tetap berfungsi dalam kondisi terang maupun gelap, sehingga cocok untuk lingkungan yang tidak selalu stabil pencahayaannya.
Fakta penting tentang modul HC-SR04
Salah satu modul yang paling sering digunakan dalam proyek robotika adalah HC-SR04. Sensor ini dikenal luas karena mudah dipakai pada mikrokontroler seperti Arduino dan Raspberry Pi.
Berikut spesifikasi umum HC-SR04 yang sering dijadikan acuan:
| Komponen | Keterangan |
|---|---|
| Tegangan operasi | 5V DC |
| Arus operasi | sekitar ±15 mA |
| Frekuensi ultrasonic | 40 kHz |
| Jarak deteksi | 2 cm hingga 400 cm |
| Akurasi | sekitar ±3 mm |
| Sudut deteksi | ±15 derajat |
| Pin interface | VCC, Trig, Echo, GND |
| Waktu respon | kurang dari 50 milidetik |
| Dimensi modul | sekitar 45 mm × 20 mm |
Spesifikasi itu membuat HC-SR04 menjadi pilihan favorit untuk pelajar, peneliti, dan pengembang pemula. Dokumentasinya juga luas, sehingga integrasi ke sistem robot bisa dilakukan dengan lebih mudah.
Keterbatasan yang perlu diperhatikan
Meski praktis, sensor ultrasonic tidak selalu sempurna dalam semua kondisi. Permukaan objek yang lembut atau menyerap suara dapat membuat pantulan gelombang menjadi lemah, sehingga pembacaan jarak kurang akurat.
Sudut permukaan objek juga memengaruhi hasil deteksi karena gelombang pantul bisa menyebar ke arah lain. Dalam situasi seperti ini, robot berisiko salah membaca jarak jika hanya mengandalkan satu jenis sensor.
Kombinasi sensor untuk navigasi yang lebih cerdas
Banyak pengembang kini menggabungkan sensor ultrasonic dengan sensor inframerah, kamera, dan kecerdasan buatan. Pendekatan ini membuat robot lebih presisi saat mengenali lingkungan dan lebih adaptif terhadap perubahan situasi di sekitar.
- Sensor ultrasonic dipakai untuk membaca jarak dasar.
- Sensor inframerah membantu mendeteksi objek tertentu.
- Kamera memberi visual yang lebih kaya bagi sistem pemrosesan.
- Kecerdasan buatan membantu robot mengambil keputusan yang lebih tepat.
Integrasi seperti ini memperkuat kemampuan robot untuk bergerak mandiri di ruang yang kompleks. Dengan ukuran kecil, biaya terjangkau, dan fungsi yang penting, sensor ultrasonic tetap menjadi salah satu fondasi utama dalam perkembangan robotika modern.