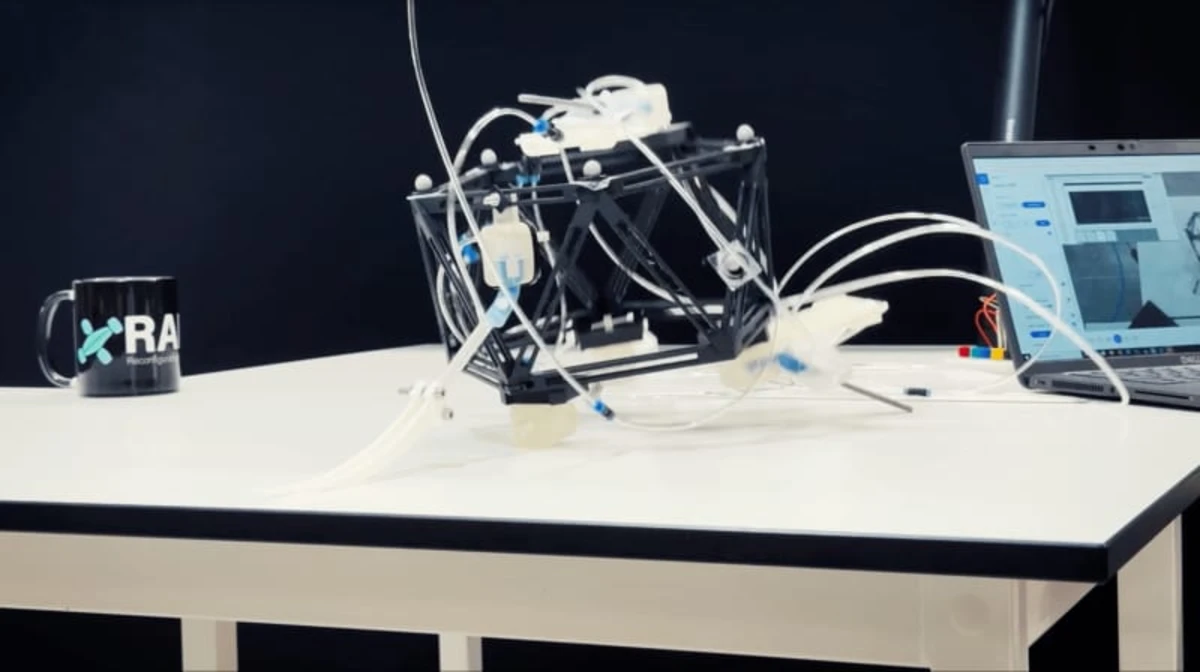
Robot lunak yang digerakkan oleh udara mampu bergerak, merasakan, dan berkoordinasi tanpa menggunakan sistem elektronik sama sekali. Penemuan ini berasal dari penelitian di Universitas Oxford, yang telah berhasil merancang mesin fleksibel yang hanya memanfaatkan tekanan udara dan rancangan mekanis cerdas untuk menghasilkan perilaku kompleks.
Robot ini terbuat dari bahan karet dan pipa udara yang dirakit seperti balok modular. Mereka dapat melakukan berbagai gerakan seperti melompat, merayap, dan mengguncang objek, bahkan bisa beroperasi secara sinkron tanpa pengontrol pusat. Penelitian ini dipublikasikan dalam jurnal Advanced Materials dan menunjukkan terobosan dalam robotika lunak yang bebas dari elektronik atau software.
Prinsip Kerja Robot Lunak Bertenaga Udara

Berbeda dari robot tradisional yang mengandalkan rangka kaku, robot lunak menggunakan tubuh lentur. Bentuk ini memungkinkan robot untuk memegang benda rapuh, melewati celah sempit, dan menyesuaikan diri dengan medan tidak rata. Hal ini mengacu pada tujuan lama di bidang robotika lunak: agar struktur fisik robot itu sendiri menjalankan sebagian besar fungsi pengambilan keputusan tanpa harus bergantung pada kode pemrograman.
Tim di Oxford mendesain modul kecil berbasis udara yang multitugas. Setiap unit modul berbentuk kubus kecil berukuran beberapa sentimeter. Modul ini bisa berfungsi sebagai “otot” yang mengembang dan mengempis, sensor tekanan, atau katup pengatur aliran udara, tergantung pada cara pemasangannya.
Modularitas dan Koordinasi Tanpa Otak Elektronik
Serangkaian modul yang disusun bisa menciptakan robot berukuran sekitar kotak sepatu. Robot-robot ini bisa melompat di tempat, mengguncang platform, atau merayap maju tanpa perubahan hardware, hanya dengan mengubah konfigurasi sambungan antara modul-modul tersebut.
Ketika modul dimodifikasi untuk menghasilkan irama osilasi mandiri, satu unit bisa memompa udara masuk-keluar secara berulang seperti otot yang berdetak sendiri. Saat beberapa modul ini digunakan sebagai “kaki” dalam satu rangka, interaksi mekanis melalui gesekan dan kontak dengan permukaan menghasilkan sinkronisasi gerak yang spontan dan alami. Fenomena ini dijelaskan dengan model matematika Kuramoto yang biasanya dipakai untuk menjelaskan sinkronisasi pengayun dan kelap-kelip kunang-kunang.
Penginderaan dan Pengambilan Keputusan Mekanik
Keunggulan lain dari robot ini adalah kemampuannya untuk merasakan dan bereaksi tanpa perangkat lunak. Setiap modul bisa berperan sekaligus sebagai sensor dan aktuator, sehingga sistem robotik dapat membuat keputusan sederhana berdasarkan kondisi fisik.
Contohnya, robot pengocok yang didesain untuk memisahkan manik-manik berdasarkan ukuran. Gerakan mengguncang ini terjadi secara mekanis sesuai desain jalur udara dan sambungan, tanpa perintah komputer. Dalam demonstrasi lain, robot perayap menggunakan sensor tekanan di “kaki” depannya untuk mendeteksi tepi meja. Ketika sensor merasakan tidak ada permukaan, aliran udara dihentikan sehingga robot berhenti sebelum terjatuh.
Masa Depan Robotik dengan Kecerdasan Terbenam
Peneliti melihat robot ini sebagai contoh embodied intelligence, di mana tubuh dan lingkungannya berperan besar dalam kontrol dan pengambilan keputusan. Pendekatan ini merubah paradigma dari robot yang “berotak” menjadi robot yang “berpikir” melalui fisika struktur tubuhnya sendiri.
Pengembangan selanjutnya akan fokus pada pembuatan robot lunak yang tidak bergantung pada perangkat eksternal untuk suplai udara, sehingga dapat berjalan atau merayap secara mandiri. Manfaat praktisnya sangat besar, terutama untuk aplikasi di lingkungan ekstrim seperti panas tinggi, radiasi kuat, atau kondisi basah dan kotor di mana peralatan elektronik sering gagal.
Penelitian ini memberikan landasan penting untuk mengembangkan mesin adaptif yang lebih cepat, efisien, dan tahan terhadap kondisi yang sulit, sekaligus menandai langkah maju dalam pengembangan robot lunak tanpa elektronik. Temuan lengkap dapat diakses melalui jurnal Advanced Materials.



