

Startup baru di bidang kendaraan otonom sedang berusaha menciptakan perangkat lunak mobil self-driving yang jauh lebih cepat. Mereka mengembangkan teknologi untuk memangkas waktu dan biaya pelatihan perangkat lunak agar mobil dapat mengemudi sendiri dengan aman. Di San Francisco, dua Tesla Model 3 dengan kamera tambahan dan superkomputer mini telah mengelilingi kota guna merekam data penting.
Tim pengembang hanya terdiri dari 17 orang dengan anggota penuh waktu kurang dari separuhnya. Mereka berbasis di Paris dan San Francisco. Startup bernama HyprLab itu dipimpin oleh Tim Kentley-Klay, eks pendiri perusahaan robotaksidan kendaraan otonom internasional. Meski hanya mengantongi pendanaan sekitar $5,5 juta, ambisi mereka membangun perangkat lunak canggih sangat tinggi.
Pendekatan Supergesit dan Efisien
HyprLab memperkenalkan produk perangkat lunak yang diberi nama Hyprdrive. Pendekatan mereka berbeda karena tim kecil dan biaya operasional ditekan serendah mungkin. Hyprdrive memanfaatkan kemajuan pembelajaran mesin untuk menurunkan biaya dan keterlibatan tenaga kerja manusia dalam pelatihan sistem mengemudi otomatis. Kentley-Klay bahkan menyebut pengembangan mereka ini sebagai sinyal kuat menuju terwujudnya sistem otonom yang aman dan scalable.
Walau timnya kecil, target HyprLab sangat jelas: akselerasi pengembangan software yang dapat membuat kendaraan mengemudi “lebih aman dari manusia.” Menurut Kentley-Klay, mereka belum sepenuhnya yakin akankah cara ini berhasil sepenuhnya, namun upaya ini telah menunjukkan peluang besar untuk ekosistem kendaraan otonom.
Teknologi Pelatihan yang Berbeda
HyprLab memulai dari teknik yang pernah digunakan startup robotika lain untuk pelatihan sistem otomatisasi. Terdapat dua pendekatan yang selama ini menjadi perdebatan di dunia kendaraan otonom:
-
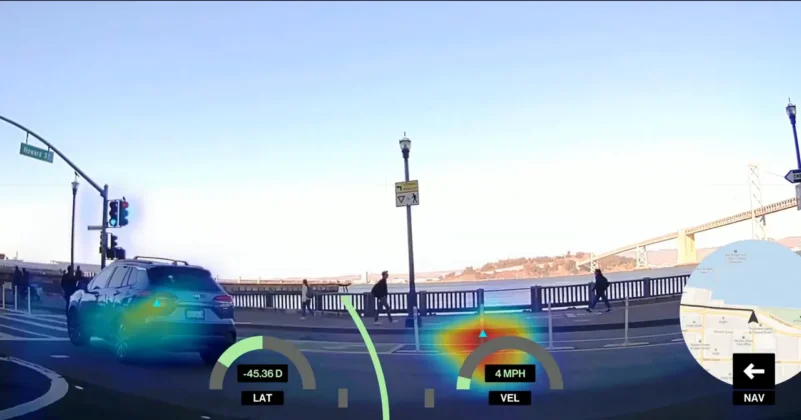
Model Berbasis Kamera Saja
- Perusahaan seperti Tesla fokus memakai kamera untuk mengumpulkan data visual, dengan target menciptakan armada robotaksidepan besar.
- Kamera di setiap unit mobil merekam perjalanan harian, data dikumpulkan dan dimasukkan ke sistem pembelajaran mesin tipe end-to-end.
- Proses pelatihan mirip seperti pelatihan anjing, menurut Philip Koopman, peneliti dari Universitas Carnegie Mellon: aksi salah dan benar diberi umpan balik secara langsung untuk memperbaiki performa sistem.
- Model Multi-Sensor (Sensor Gabungan)
- Pesaing seperti Waymo atau Cruise mengombinasikan kamera, lidar, dan radar yang mahal namun lebih informatif untuk memberikan data lebih kaya.
- Pendekatan multi-sensor ini dinilai menawarkan akurasi dan keamanan lebih tinggi, tetapi lebih tinggi pula biaya dan kompleksitas sistemnya.
Persaingan dan Tantangan Industri
Para pengembang kendaraan otonom selama bertahun-tahun menghadapi kekecewaan akibat target ambisius yang meleset. Hingga kini baru sedikit perusahaan yang bisa mengoperasikan robotaksi secara publik. Namun, pesatnya kemajuan pembelajaran mesin memberikan harapan baru bahwa produksi massal kendaraan self-driving akan lebih cepat terwujud.
Perkembangan seperti HyprLab menandakan perubahan pendekatan dalam dunia mobil cerdas. Fokus mereka pada tim ramping, pelatihan efisien, dan teknologi machine learning mutakhir berpeluang mendorong terciptanya perangkat lunak self-driving berkualitas tinggi dalam waktu lebih singkat. Upaya HyprLab kini menjadi sorotan, dan dapat menjadi acuan baru bagi industri otomatisasi kendaraan global yang semakin kompetitif.