Para ilmuwan berhasil mengajarkan robot mikroskopis berenang melalui labirin menggunakan prinsip relativitas Einstein. Metode ini mengintegrasikan teori relativitas umum dengan kendali robotik berbasis pola cahaya untuk mengarahkan robot secara presisi tanpa perlu sensor besar.
Robot mikroskopis yang dikembangkan berukuran sekitar 100 mikron, setara dengan lebar rambut manusia. Mereka dilengkapi dengan sel surya kecil yang menggerakkan elektroda di ujung robot, memproduksi medan listrik yang menjadi tenaga penggerak di dalam larutan terionisasi.
Mengatasi Tantangan Navigasi Mikro-Robot
Tantangan utama dalam mengembangkan microrobot adalah menciptakan sistem navigasi yang efektif tanpa menambah ukuran robot secara signifikan. Sensor dan elektronik yang besar membuat robot tidak bisa beroperasi di skala mikro, seperti di dalam tubuh manusia. Untuk itu, para peneliti dari University of Pennsylvania mengadopsi konsep "ruang-waktu buatan" yang memungkinkan robot untuk bergerak layaknya pesawat ruang angkasa dalam alam semesta.
Prinsip Relativitas yang Mengarahkan Pergerakan
Menurut teori relativitas umum Einstein, gravitasi menyebabkan pembengkokan ruang-waktu di sekitar massa. Objek dan cahaya bergerak mengikuti lintasan terpendek bernama geodesik yang tampak melengkung akibat massa tersebut. Contohnya adalah fenomena lensa gravitasi, di mana cahaya yang melewati medan gravitasi suatu objek besar seperti gugusan galaksi tampak melengkung dan diperbesar.
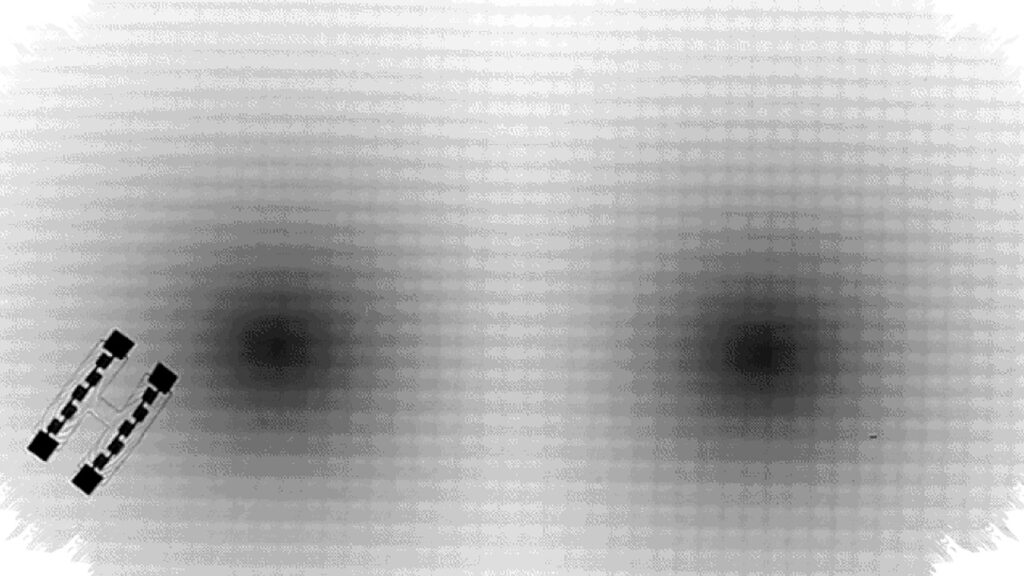
Dalam eksperimen ini, para ilmuwan mensimulasikan labirin sebagai ruang 2D dengan medan gravitasi buatan, menggunakan persamaan relativitas. Wilayah gelap dalam pola cahaya mewakili medan gravitasi kuat yang menarik robot, sedangkan daerah terang berfungsi sebagai hambatan atau rintangan yang harus dihindari.
Robot Mengikuti Jalur Geodesik secara Alami
Robot berenang dalam larutan mengikuti medan listrik yang terbentuk oleh pola cahaya. Tanpa diberi perintah lebih, robot bergerak secara otomatis melewati jalur geodesik, menghindari tembok labirin seolah-olah sedang "meluncur" di ruang yang terdistorsi. Strategi ini memungkinkan robot mencapai titik tujuan yang disimulasikan sebagai "black hole" atau lubang hitam palsu—tempat gelap dengan gaya tarik elektromagnetik paling kuat.
Keterkaitan Fisika dan Teknologi Robotik
Marc Miskin, profesor teknik listrik dan sistem di University of Pennsylvania, menyatakan bahwa studi ini menjadi jembatan antara fisika teori dan teknologi robotik praktis. Dengan menghubungkan perilaku robot dengan prinsip optik dan relativitas, para peneliti menggunakan teori abstrak untuk mengatasi masalah mekanistik yang konkret dalam robotik.
Potensi Aplikasi Masa Depan
Meskipun masih dalam tahap awal, temuan ini dapat membuka jalan baru bagi pemanfaatan robot mikroskopis di berbagai bidang. Dalam waktu sepuluh tahun ke depan, teknologi ini berpotensi diterapkan untuk:
- Pemeriksaan gigi setelah prosedur saluran akar sebagai biopsy mikro.
- Deteksi dan eliminasi tumor dengan presisi tinggi berdasarkan hasil pengukuran lokal.
- Perakitan mikrocip menggunakan robot kecil sebagai asisten manufaktur.
Robot mikroskopis ini dengan sistem navigasi berbasis prinsip relativitas memperlihatkan bahwa dunia mikroskopis menawarkan banyak kemungkinan inovatif yang belum tergali.
Para peneliti berharap bahwa metode ini bukan hanya sekadar eksperimen awal, melainkan titik awal eksplorasi robotik canggih yang memadukan pengetahuan fisika fundamental dengan teknologi kontrol cerdas. Dengan terus mengembangkan konsep "ruang-waktu buatan" dan pola cahaya adaptif, masa depan microrobot akan semakin dekat dengan aplikasi nyata yang bermanfaat bagi ilmu kedokteran dan teknologi manufaktur.