

An ESP32 project is showing that a 360-degree sonar radar does not need a crowded stack of hardware to look impressive. By pairing an HC-SR04 ultrasonic sensor with a stepper motor, the system scans the area around it and sends the readings to a PC, where they appear as a live radar display.
What makes the build stand out is not only the rotating sensor but also the way the software is put together. SciCraft, the maker behind the project, presents it with a YouTube video, a build guide, and source code on GitHub that is organized clearly enough to be studied instead of simply copied.
How the scan works
The core idea is straightforward: rotate the sensor, measure distance at set angular points, and turn those measurements into a visual map. The ESP32 keeps the HC-SR04 moving through a continuous 360-degree sweep while collecting distance data at specific angle intervals.
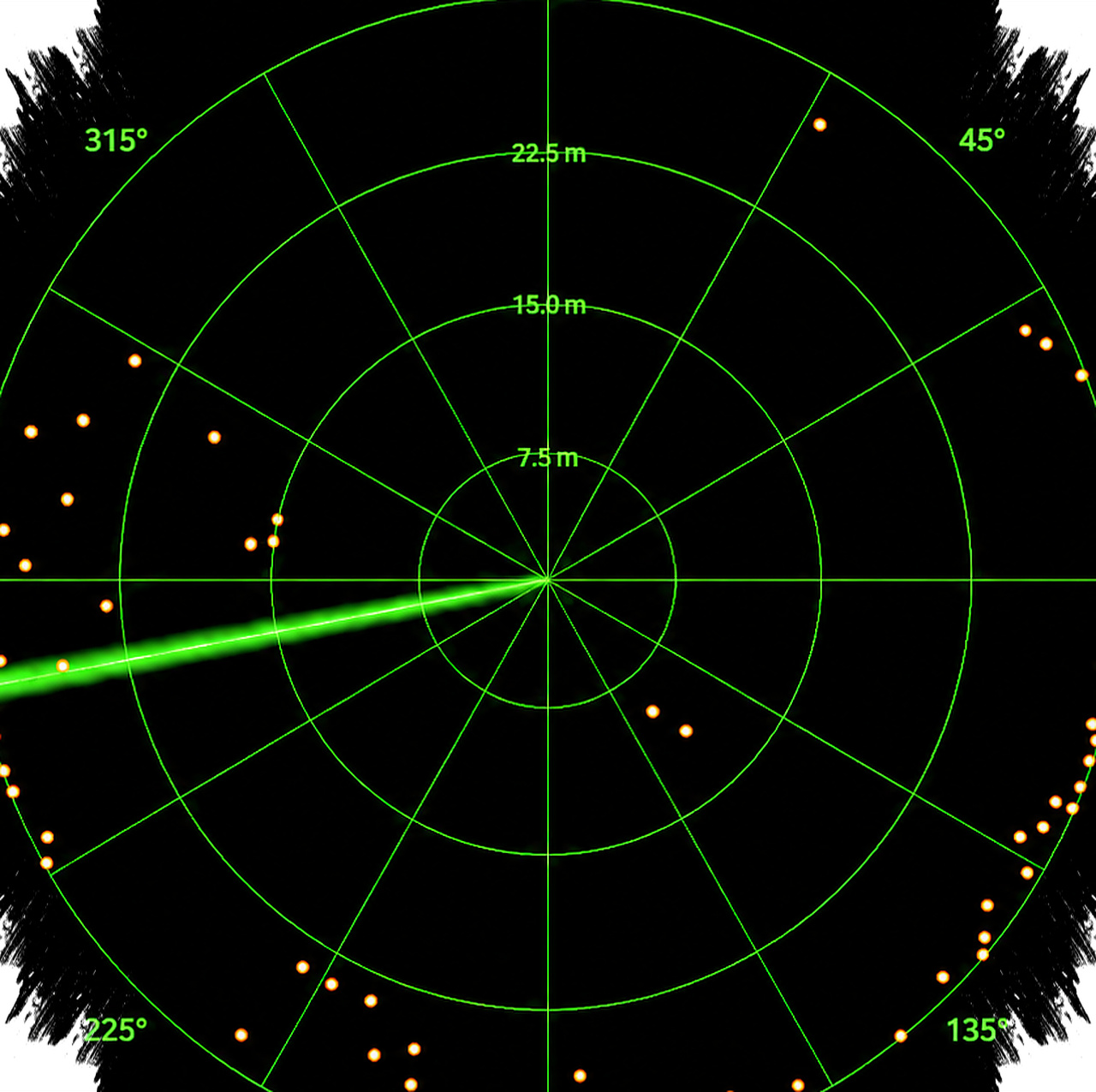
Each time the sensor reaches or passes a defined angle, the system reads the distance and sends the result as an angle,distance pair. That data travels over a TCP socket to a Processing-based interface running on a computer, which draws the information as a real-time radar screen.
This setup gives the project a polished look on the outside while keeping the underlying mechanism simple. Instead of a complicated sensor fusion system, the build focuses on one task: detecting objects around the device and showing their position by angle and range.
One ESP32 handles the entire system
A notable part of the project is that there is no separate board taking over the main workload. The ESP32 manages the motor movement, the ultrasonic sensing, and the network communication used to feed the PC interface.
That approach is attractive to hardware hobbyists because it shows how much the chip can do in a compact build. It also avoids the extra layers that often make similar projects harder to assemble and troubleshoot.
The hardware list stays modest as well. The main components are the ESP32, a stepper motor, a power source such as a battery, and a rotating platform to support the sensor.
Why the code matters as much as the hardware
The software side is a major part of the project’s appeal. SciCraft structures the code in a way that is easy to read and explains each part on GitHub, which makes the project more useful for learning than many DIY builds that only provide raw files.
That kind of documentation matters because it helps users understand the logic behind the program. Instead of treating the code as something to paste into a board and forget, the project encourages readers to see how the system works and how it could be adapted later.
For beginners, that can lower the barrier to entry. For more experienced users, the clearer structure makes it easier to modify the system for other motors or sensors without rebuilding the entire flow from scratch.
A simple build with strong visual impact
The final result looks like a sci-fi style rotating scanner, but the implementation remains approachable for home projects. The radar view on the PC gives a strong visual demonstration, while the actual electronics stay familiar to the maker community.
That balance is part of why the project stands out. It does not try to solve every sensing problem, but it does show how a clean design can produce a convincing 360-degree sonar effect with relatively few parts.
By combining an ESP32, an HC-SR04, a stepper motor, and a Processing interface, SciCraft demonstrates that a rotating radar display can be built with a focused architecture. The TCP-based flow from angle and distance data to live visualization keeps the system efficient, and the well-organized code makes the project easier to understand and extend.